P

P
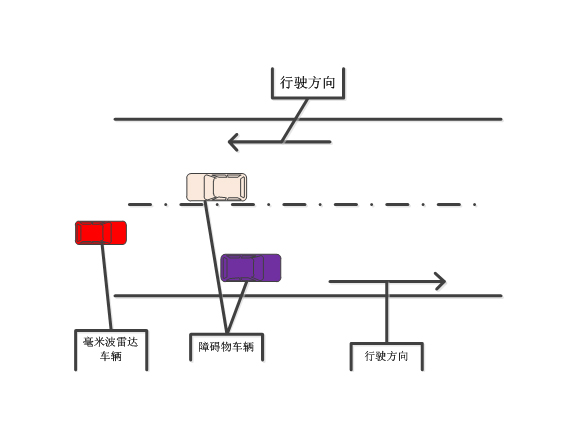
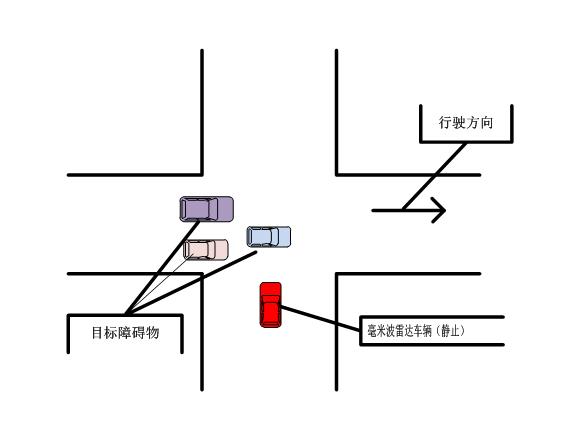
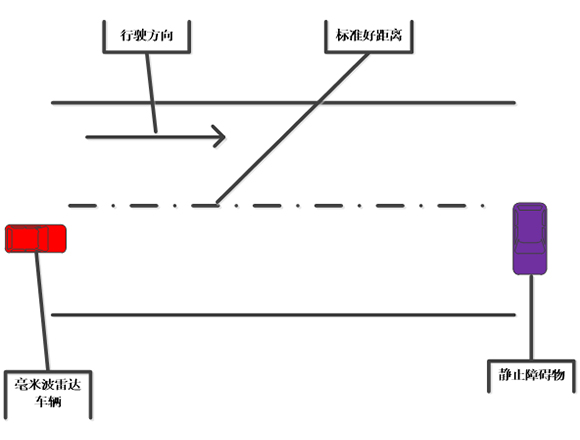
AST-SMMW-40 millimeter wave radar system is an efficient 24GHz radar solution with complete functions and low cost. It is able to detect objects driving in speed of 70m/s above 40m away and trace 32 objects at the same time.
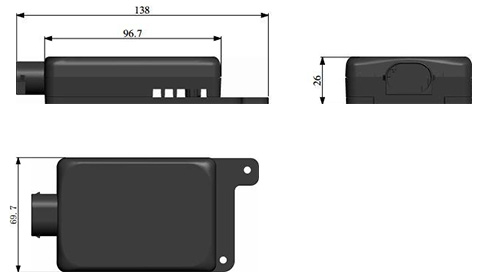
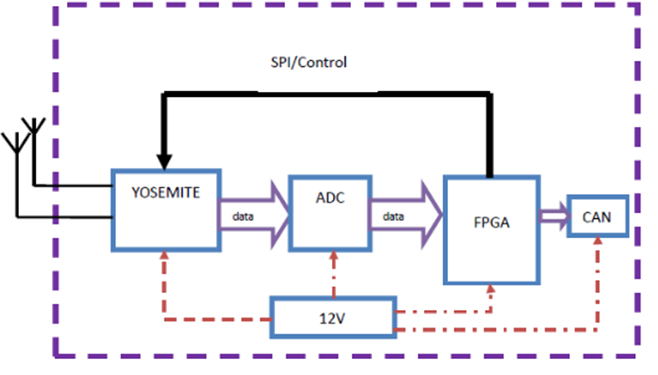
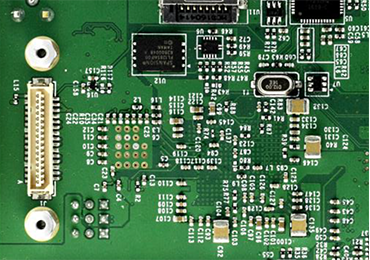
The system is composed by an antenna board and a main board. The antenna board integrates radar transmit-receive sensor chip with CMOS feature and a special antenna design, being 24GHz mm – wave. The main board has a high performance ADC chip and FPGA chip. It is realized by a whole set of radar algorithm.
| Serial number | Content | Parameter |
|---|---|---|
| Performance specifications | ||
| 1 | Range (small obstacle - such as people) 40m | 40m |
| Range (large obstacle - such as truck) | 50m | |
| 2 | Relative speed | 70 m / s |
| 3 | Horizontal scanning angle | ±40 ° |
| 4 | Distance accuracy | Error±9 % |
| 5 | Speed accuracy | ±0.2 m / s |
| 6 | Angle accuracy | ±1 ° |
| 7 | Distance resolution | 0.75m |
| 8 | Tracks | 32个 |
| Hardware specifications | ||
| 9 | Transmission frequency | 24GHz |
| 10 | System power consumption | 2W |
| 11 | Power | 12V |
| 12 | Bandwidth | 200MHz |
| 13 | Signal modulation method | FMCW |
| 14 | Output mode | Analog continuous output |
| 15 | Update rate | 25Hz |
| 16 | Working environment temperature | -40℃~+85℃ |
| 17 | Save the ambient temperature | -60℃~+125℃ |
| Contrast item | AST-SMMW-100 | Similar products |
|---|---|---|
| Chip | Using CMOS structure, Efficient | Non-CMOS |
| Low power consumption | 2W | 4W |
| High accuracy: Relative distance | ±0.01m | ±0.1m |
| High accuracy: Speed accuracy | ±0.2m/s | ±0.5m/s |
1. Compact package, Solid state technology; 2. Cost-effective, Detection distance;
3. Light weight, Small size, Low power consumption; 4. Leading performance and durability.